Introduction
Pandora Robotics was founded in 2007 when a group of ambitious students of our department, who wanted to apply the knowledge they accumulated over their studies on a real project, met some professors who shared the same passion for robotics.
Pandora Robotics Team has competed in the RoboCup Rescue competition 5 times: 2008 in Suzhou, China, 2009 in Austria, 2011 in Instanbul, 2013 in Eindhoven and 2015 in Hefei, China. The reputation of our team peaked, when we came out second in autonomy category in 2013 in Eindhoven, Netherlands and in 2015, Hefei, China.
The goal of this competition is the development of one or more robotic vehicles that can navigate areas having suffered a natural disaster – like an earthquake – and are able to locate human victims. For this purpose we have created several vehicles that incorporate sensors for determining their positiion in space and others for detecting and identifying victims. The vehicles are autonomous, which means they are able to move without the aid of a GPS system and with no teleoperation. They autonomously create maps and carry out the indentification proccess.

The accomplishments of Pandora Robotics are recognized worldwide. Some of our programs are used in robotic applications all over the world, as we are active members and contributors of the open source community. Proof of the quality of our work are the old members of the team (over 180 through the years), who are currently distinguished scientists working in Greece or abroad.
The start – 2007
In the first PANDORA project, called “Robot arm", a robotic arm of 4 DOF (four degrees of freedom) was created, capable of detecting, grasping and moving specific objects. The arm's target was to detect an object of specific color that existed on a surface, to pick it up and place it in a predefined spot.




RoboCup 2008 – Suzhou – China
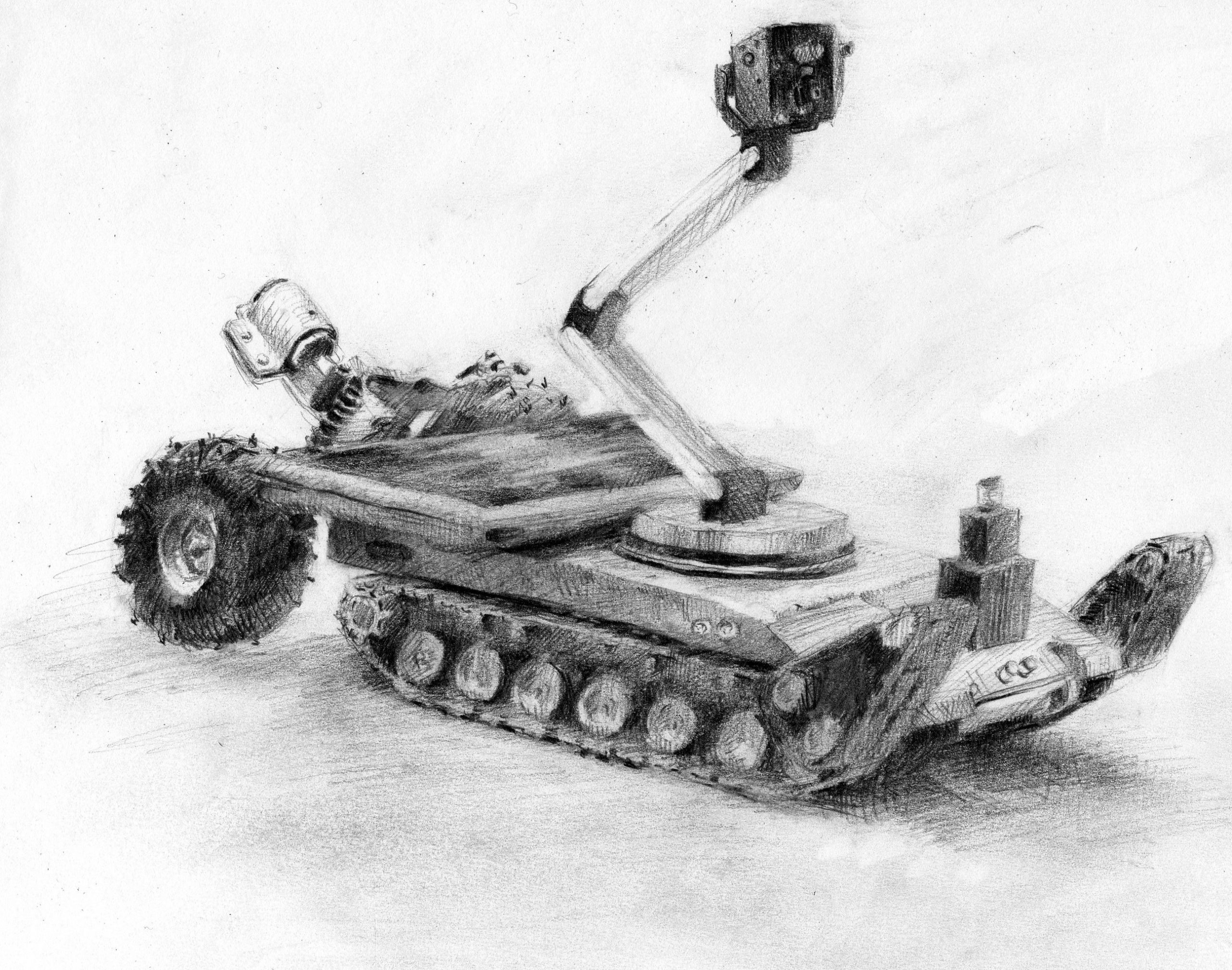
The successful creation of the robotic arm paved the road to the dream! The members of the team, along with their mentors decided to aim high by participating in the word-wide competition called RoboCup and specifically in the domain of RoboRescue. The goal was to create a real search-and-rescue robot, capable of mapping the environment and detecting human presence in it. In fact, PANDORA was the first Greek team that even participated in the competitions rescue division. In the pictures below you may find a sketch, depicting the form the robot should have, as the members initially visualized it in November 2007, seven months before the actual competition, held in Suzhou, China, at the summer of 2008. PANDORA managed to reach place 9 out of 18 contestants in the overall score.



























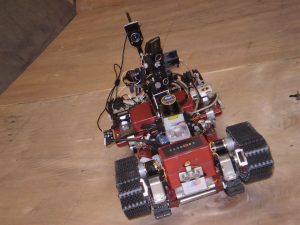

RoboCup 2009 – Graz – Austria
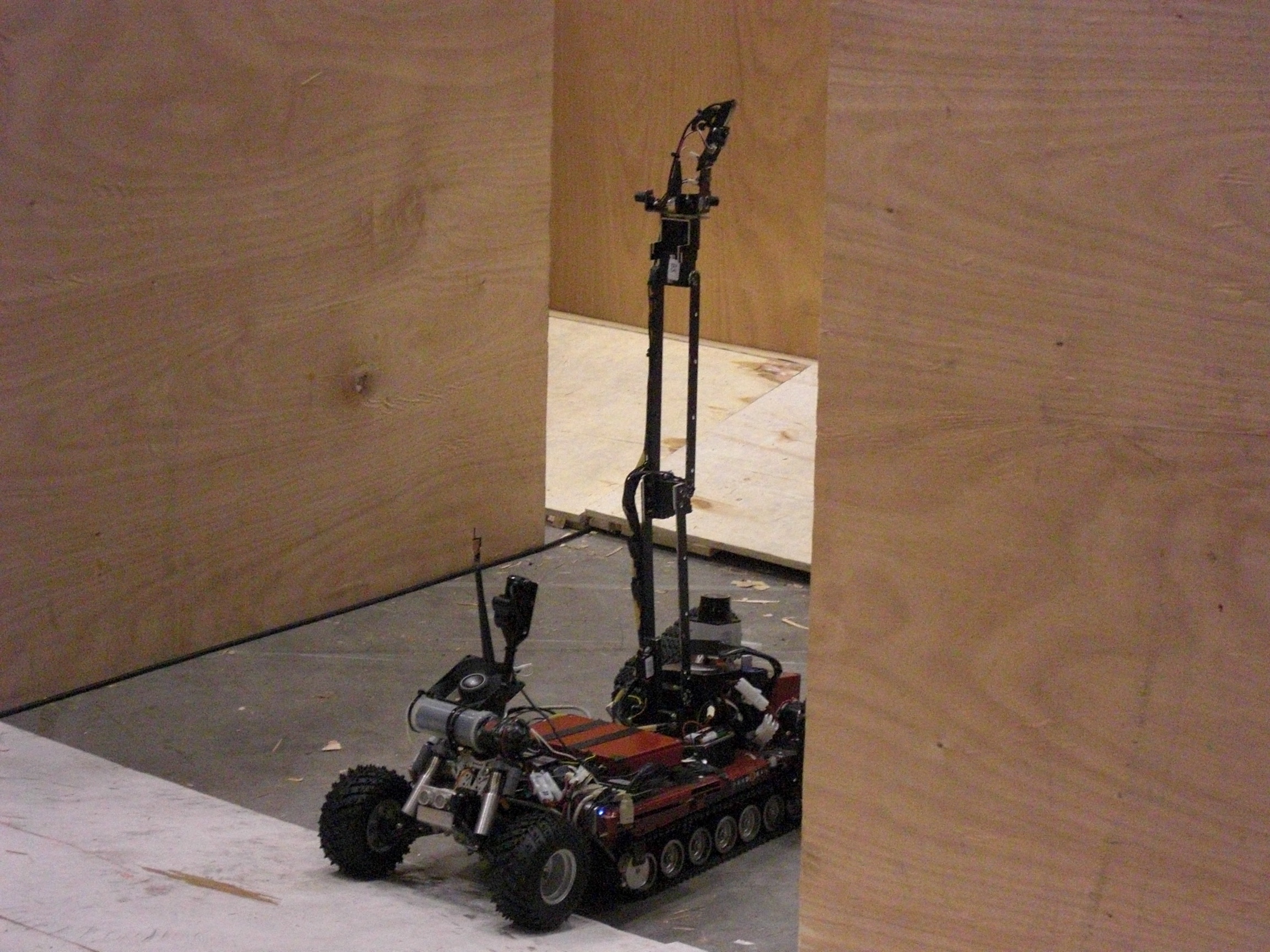
The first positive experience of PANDORA in the RoboCup-Rescue competition, motivated us for more work and technical novelties. In 2009, the team decided to manufacture a new tracked vehicle from scratch, asking the assistance of mechanical engineers. The vehicle was designed in specialized software, manufactured in a machine shop, assembled in our lab and finally integrated with sensors. The new vehicle included several sensors, a robotic arm of 5 degrees of freedom with a “head", as well as more powerful brushless DC motors. The greater novelty in comparison to the previous years was that the vehicle performed full space exploration completely autonomously, fact that defined the future research goals of the team. The team again achieved the 9th place out of 20 contestants.

























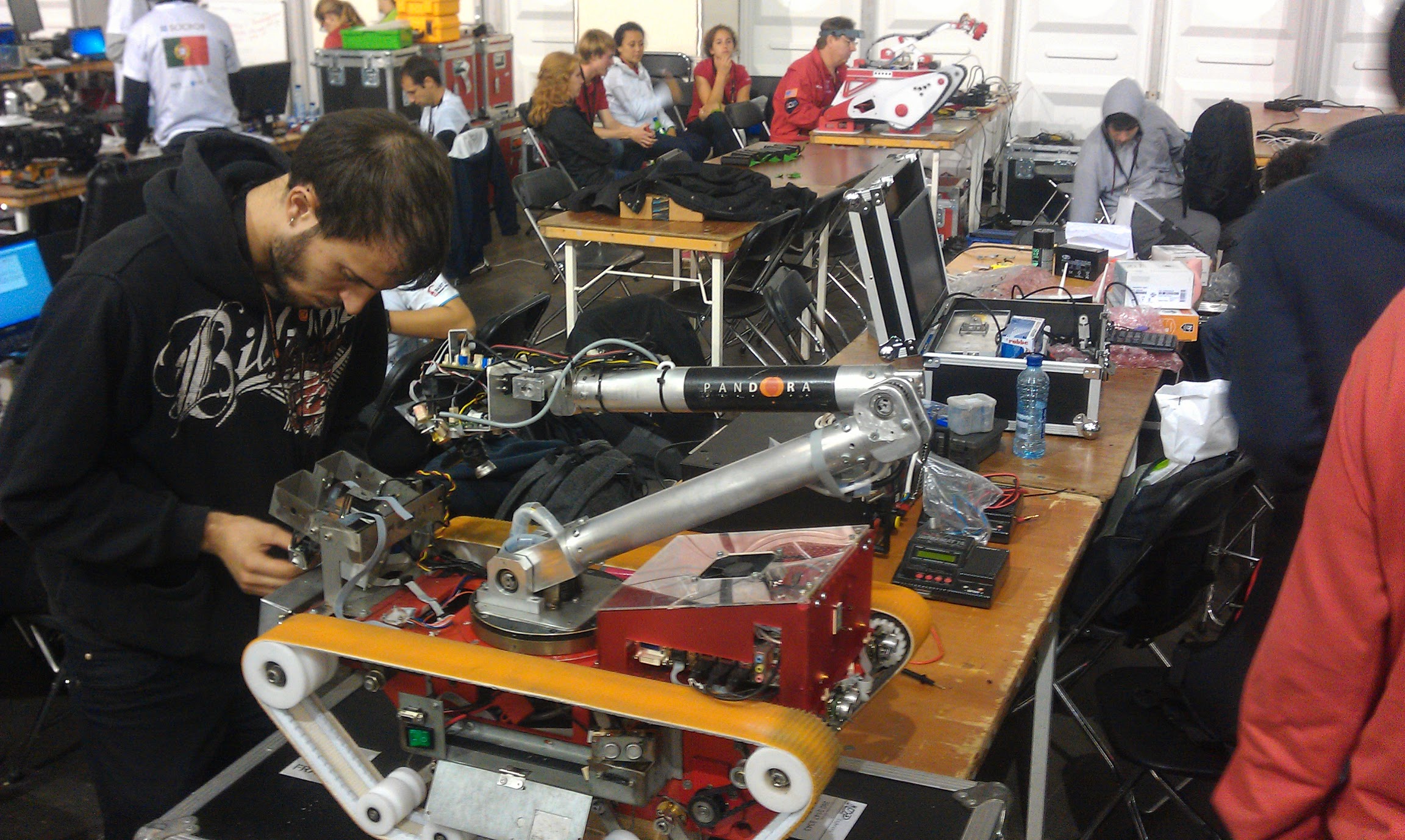
RoboCup 2011 – Istanbul – Turkey
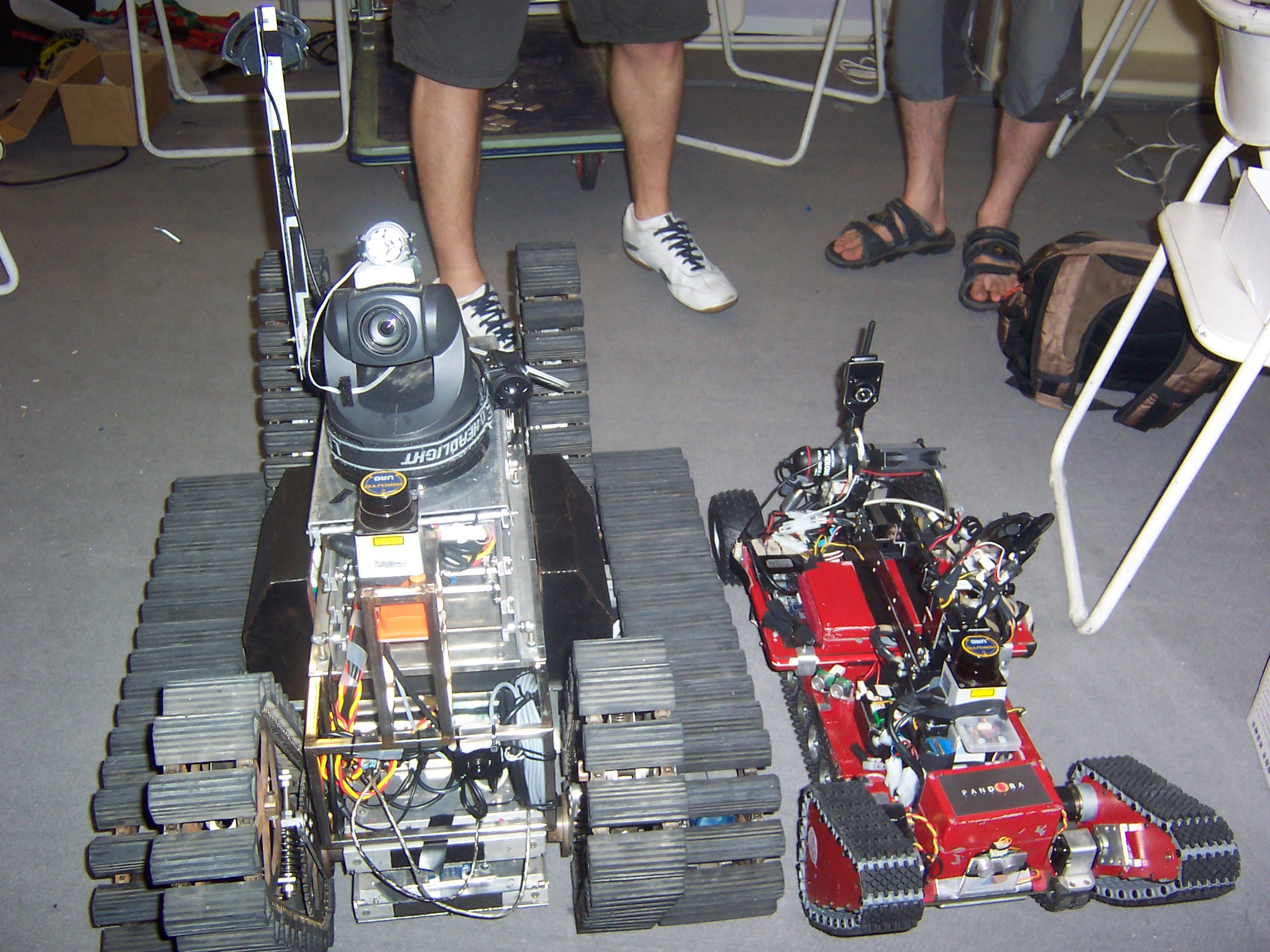
In the third participation of PANDORA in the RoboCup-Rescue competition, it was decided for the first time to apply a multi-robot approach in the field of robotic search and rescue. In 2011 we developed two new vehicles, the first being similar to the one from 2009 (but with improvements in several things), whilst the second was slightly larger, so as to be used as teleoperated. Both vehicles included tracks, a 5-DOF robotic arm, as well as grippers on the arm. Unfortunately it wasn’t possible to complete the teleoperating vehicle, nevertheless PANDORA for the first time participated in the special competitions of Autonomy and Manipulation (of objects). This time we achieved the 10th place out of 17 contestants.

















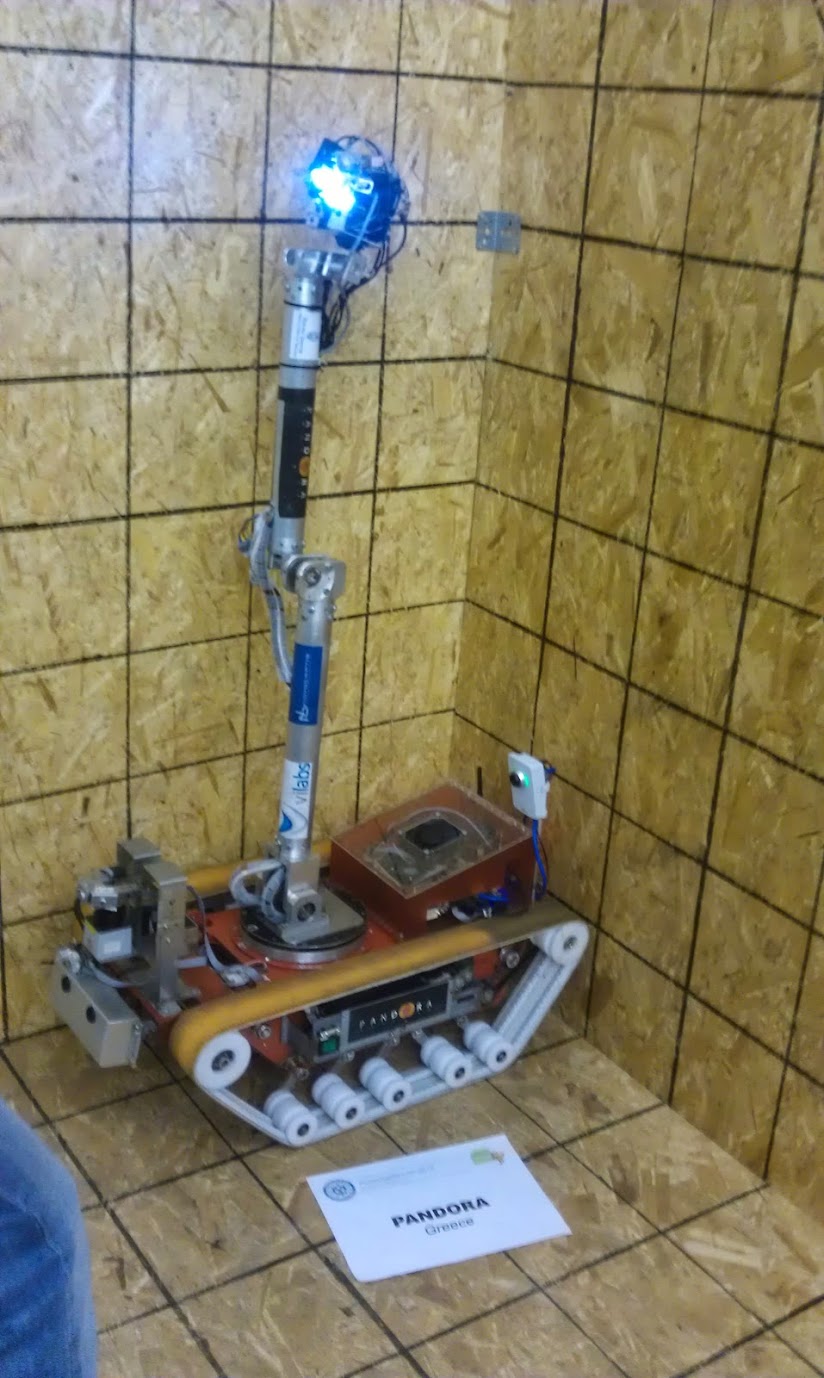
RoboCup 2013 – Eindhoven – Netherlands
The fourth participation of the team in the competition was in 2013 in Eindhoven, Netherlands. The basic differences concerning hardware and software was the employment of a stereo camera, the more robust reimplementation of the robotic arm, the better development of the motin model, as well as the creation of a novel software architecture concerning the data aggregation from the sensors. Furthermore, we have utilized ROS (Robot Operating System) for the first time, thus increasing the software standardization and minimizing the debugging and system inspection times. The team once more participated in the Autonomy finals, achieving the second place world-wide, its higher distinction thus far.



















RoboCup 2015 – Hefei – China
In 2015, PANDORA targeted to harvest the accumulated experience of the last four years and participated in the new competition that was held in Hefei, China. This time the vehicle was simplified to a large extend, taking under consideration the requirements of the autonomous part of the competition. The tracks were abandoned and wheels were employed in a skid-steering model using 4W motion, fact that improved the mobility of the vehicle. Furthermore, the robotic arm of 5 DOF was replaced with a simpler one that was linear, having 3 DOF. Large attention was paid to software, where several of the robotic algoritms were improved, as well as the infrastructure for deployment and testing. The team managed to go to the Autonomy finals, where it made its best appearance, by mapping a large portion of the environment , thus achieving the second place world-wide, just a few points behind team Hector.



















